Roboţii cu componente umane reale nu mai sunt ceva ce ar putea exista doar în filmele Sci-Fi, de genul „Star Trek" sau „Battlestar Galactica", dar s-ar putea să fie mai aproape de realitate decât credem. Oamenii de ştiinţă din Japonia au realizat un progres semnificativ în robotica cyborg prin fuzionarea ţesutului uman cu un robot, permiţându-i acestuia să meargă cu ajutorul unor angrenaje alimentate de muşchi.
Cercetătorii de la Universitatea din Tokyo s-au concentrat pe crearea unui robot biohibrid care combină ţesuturile musculare cu materiale artificiale. Studiul care descrie reuşita a fost publicat vineri în revista Matter.
Această realizare, pe care cercetătorii o descriu drept un „salt uriaş" în domeniu, implică un robot construit folosind cauciuc siliconic şi ţesuturi musculare scheletice cultivate în laborator.
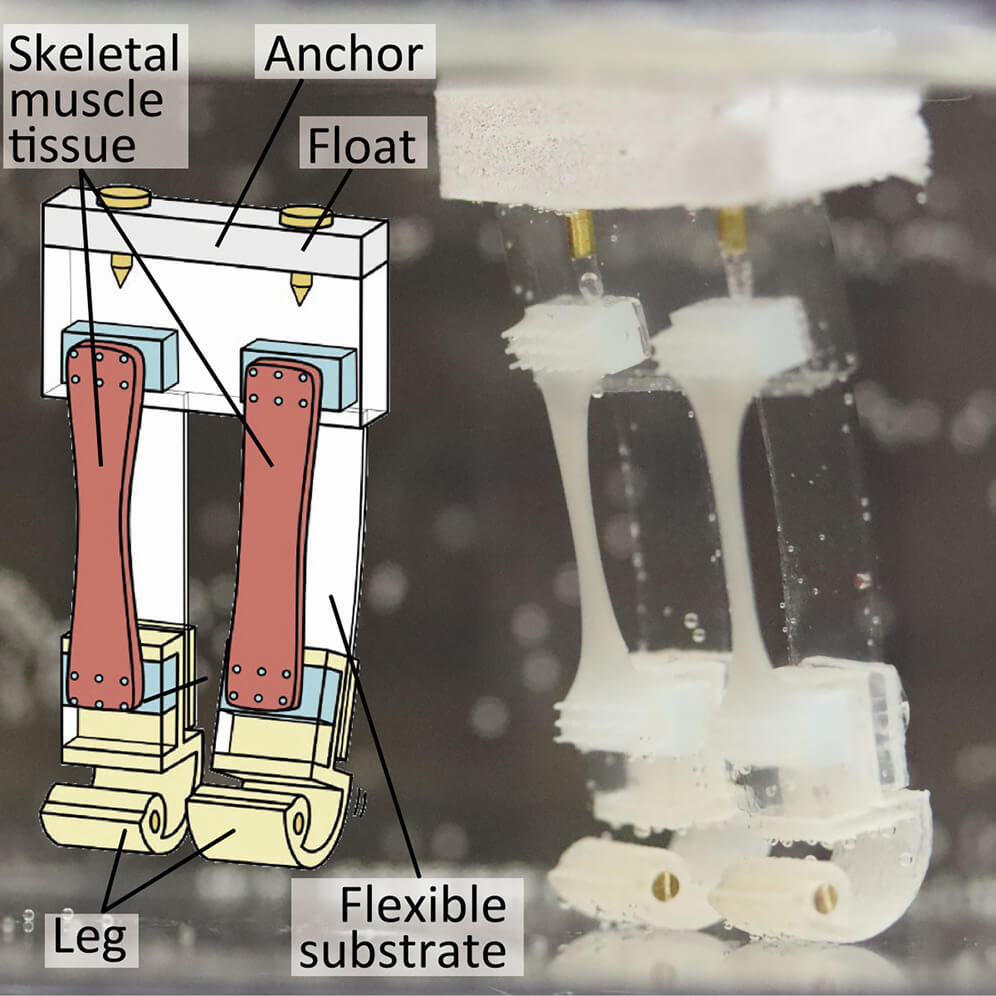
Robot biohibrid cu două picioare. Credit: Grupul de cercetare Shoji Takeuchi, Universitatea din Tokyo
Cyborgul cu două picioare este conceput pentru a imita mişcările umane şi poate merge şi se poate întoarce, deşi, în prezent, într-un ritm lent.
Această abordare inovatoare permite robotului să se deplaseze eficient şi silenţios, cu o atingere moale, reflectând flexibilitatea şi capacităţile de mişcare fină ale corpului uman.
„Cercetările privind roboţii biohibrizi, care reprezintă o fuziune între biologie şi mecanică, atrag recent atenţia ca un nou domeniu al roboticii cu funcţii biologice", afirmă autorul studiului, dr. Shoji Takeuchi, într-un comunicat.
„Utilizarea muşchilor ca actuatori ne permite să construim un robot compact şi să obţinem mişcări eficiente, silenţioase şi cu o atingere moale", a precizat el.
Video cu un robot bipedal acţionat de ţesut muscular scheletic cultivat Credit: Matter, ianuarie 2024
Creaţia echipei este capabilă să meargă sub apă, datorită vârfului său de baliză din spumă, picioarelor cu greutăţi şi unui schelet din cauciuc siliconic care se îndoaie şi se flexează ca răspuns la mişcările musculare.
Mişcarea robotului este alimentată de ţesuturile musculare scheletice crescute în laborator şi ataşate la picioarele sale, care se contractă atunci când sunt stimulate cu electricitate.
Prin alternarea stimulărilor electrice între piciorul stâng şi cel drept la fiecare cinci secunde, robotul poate merge cu o viteză de aproximativ 5,4 mm pe minut sau 0,002 mile pe oră.
Pentru a permite întoarcerea, echipa a activat piciorul drept în mod repetat, în timp ce piciorul stâng a acţionat ca o ancoră, realizând un viraj de 90 de grade în 62 de secunde.
[ot-video] [/ot-video]
Mişcarea de întoarcere a robotului biohibrid bipedal. Credit: Matter, ianuarie 2024
În ciuda acestor realizări, dr. Takeuchi recunoaşte că este nevoie de îmbunătăţiri suplimentare.
„În prezent, mişcăm manual o pereche de electrozi pentru a aplica un câmp electric individual picioarelor, ceea ce necesită timp", spune dr. Takeuchi.
Pe viitor, prin integrarea electrozilor în robot, cercetătorii se aşteaptă să crească viteza.
În plus, trebuie integrate un sistem de alimentare cu nutrienţi şi structuri pentru a susţine ţesuturile vii care permit robotului să funcţioneze în aer.
„Deşi ar putea părea paşi mici, aceştia sunt, de fapt, un salt uriaş înainte pentru roboţii biohibrizi", spune dr. Takeuchi.




