
O reţea neuronală ar putea dezvălui modul în care creierul controlează mişcările complexe şi coordonate.
Agilitatea cu care se mişcă oamenii şi animalele este o minune evolutivă pe care niciun robot nu a reuşit încă să o imite în totalitate.
Pentru a ajuta la elucidarea misterului privind modul în care creierul controlează mişcarea, cercetătorii în neuroştiinţe de la Harvard au creat un şobolan virtual cu un creier artificial care se poate deplasa exact ca o rozătoare reală.
Bence Ölveczky, profesor în cadrul Departamentului de Biologie Organică şi Evolutivă de la Harvard, a condus un grup de cercetători care a colaborat cu oamenii de ştiinţă de la laboratorul de inteligenţă artificială DeepMind al Google pentru a construi un model digital biomecanic realist al unui şobolan.
Utilizând date de înaltă rezoluţie înregistrate de la şobolani reali, aceştia au antrenat o reţea neuronală artificială - „creierul” şobolanului virtual - pentru a controla corpul virtual într-un simulator numit MuJoco, în care sunt prezente gravitaţia şi alte forţe.
Cercetătorii au descoperit că activările din reţeaua de control virtuală au estimat cu exactitate activitatea neuronală măsurată din creierele şobolanilor reali care produc aceleaşi comportamente, a declarat Ölveczky, care este expert în antrenarea şobolanilor (reali) pentru a învăţa comportamente complexe în scopul de a le studia circuitele neuronale.
Această realizare, publicată marţi în revista Nature, reprezintă o nouă abordare pentru a studia modul în care creierul controlează mişcarea, a spus Ölveczky, prin valorificarea progreselor în domeniul învăţării de întărire profundă şi al inteligenţei artificiale (AI), precum şi a urmăririi mişcărilor 3D la animale care se comportă liber.
DeepMind a dezvoltat o platformă pentru a antrena agenţi biomecanici să se deplaseze în medii complexe şi a rula simulări pentru a antrena aceste reţele.
Colaborarea cu cercetătorii de la Harvard a fost „o oportunitate foarte interesantă pentru noi”, a declarat coautorul şi directorul principal de cercetare al Google DeepMind, Matthew Botvinick.
„Am învăţat enorm de mult din provocarea de a construi agenţi virtuali: sisteme de inteligenţă artificială care nu numai că trebuie să gândească inteligent, dar trebuie, de asemenea, să transpună această gândire în acţiuni fizice într-un mediu complex. A părut plauzibil că adoptarea aceleiaşi abordări într-un context de neuroştiinţă ar putea fi utilă pentru a oferi informaţii atât despre comportament, cât şi despre funcţionarea creierului", a explicat acesta.
Echipa de la Harvard a lucrat îndeaproape cu cercetătorii DeepMind pentru a antrena reţeaua neuronală artificială în vederea implementării a ceea ce se numeşte modele de dinamică inversă, despre care oamenii de ştiinţă cred sunt folosite de creierul nostru pentru a ghida mişcarea.
Atunci când întindem mâna după o ceaşcă de cafea, de exemplu, creierul nostru calculează rapid traiectoria pe care ar trebui să o urmeze braţul nostru şi traduce acest lucru în comenzi motorii.
În mod similar, pe baza datelor de la şobolani reali, reţeaua a fost alimentată cu o traiectorie de referinţă a mişcării dorite şi a învăţat să producă forţele necesare pentru a o genera.
Acest lucru a permis şobolanului virtual să imite o gamă diversă de comportamente, chiar şi cele pentru care nu fusese antrenat în mod explicit.
Aceste simulări pot lansa un domeniu neexploatat al neuroştiinţei virtuale, în care animalele simulate prin AI, antrenate să se comporte ca cele reale, oferă modele convenabile şi complet transparente pentru studierea circuitelor neuronale şi chiar a modului în care aceste circuite sunt compromise în caz de boală.
În timp ce laboratorul american este interesat de întrebări fundamentale despre modul în care funcţionează creierul, platforma ar putea fi folosită, ca un exemplu, pentru a proiecta sisteme de control robotic mai bune.
Un pas următor ar putea fi acela de a da autonomie animalului virtual pentru a rezolva sarcini asemănătoare cu cele întâlnite de şobolanii reali.
„Din experimentele noastre, avem o mulţime de idei despre cum sunt rezolvate astfel de sarcini şi cum sunt implementaţi algoritmii de învăţare care stau la baza dobândirii comportamentelor abilitate”, a continuat Ölveczky.
„Vrem să începem să folosim şobolanii virtuali pentru a testa aceste idei şi pentru a ne ajuta să avansăm în înţelegerea modului în care creierele reale generează comportamente complexe”, a menţionat cercetătorul de la Harvard.
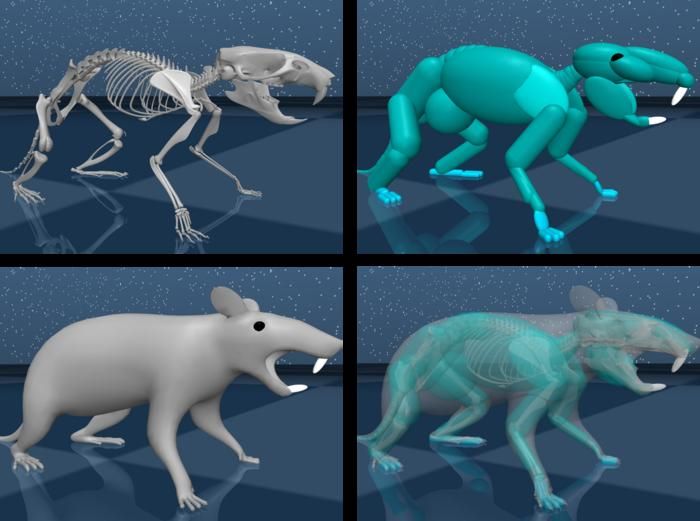
Cercetătorii de la Harvard şi Google DeepMind au creat un şobolan virtual folosind datele de mişcare înregistrate de la şobolani reali. Credit: Google DeepMind, iunie 2024




