Cancerul pulmonar este principala cauză a deceselor cauzate de cancer în Statele Unite. Unele tumori sunt extrem de mici şi se ascund adânc în ţesutul pulmonar, ceea ce face dificil pentru chirurgi să ajungă la ele. Pentru a aborda această provocare, cercetătorii americani au lucrat la un robot extrem de flexibil, dar robust, capabil să traverseze ţesutul pulmonar.
Cercetările unei echipe multidisciplinare de la UNC - Chapel Hill şi Universitatea Vanderbilt au atins acum o nouă etapă importantă.
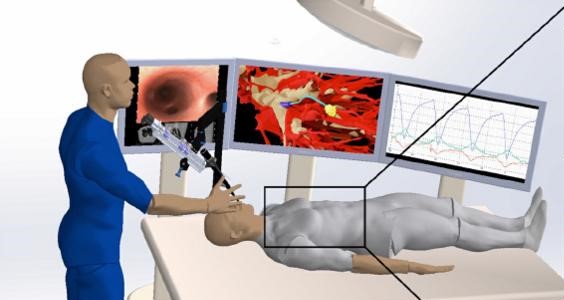
Într-o nouă lucrare, publicată miercuri, în revista Science Robotics, echipa a demonstrat într-un model viu de laborator că robotul se poate deplasa în mod autonom din „punctul A" în „punctul B", evitând în acelaşi timp structuri importante, cum ar fi micile căi respiratorii şi vasele de sânge.
„Această tehnologie ne permite să atingem ţinte pe care altfel nu le putem atinge cu un bronhoscop standard sau chiar robotizat", spune dr. Jason Akulian, coautor al lucrării şi şef de secţie de pneumologie intervenţională şi oncologie pulmonară în cadrul departamentului de boli pulmonare şi medicină de urgenţă de la UNC.
„Îţi oferă acei câţiva centimetri sau chiar câţiva milimetri în plus, ceea ce ar ajuta enorm la urmărirea ţintelor mici din plămâni", precizează el.
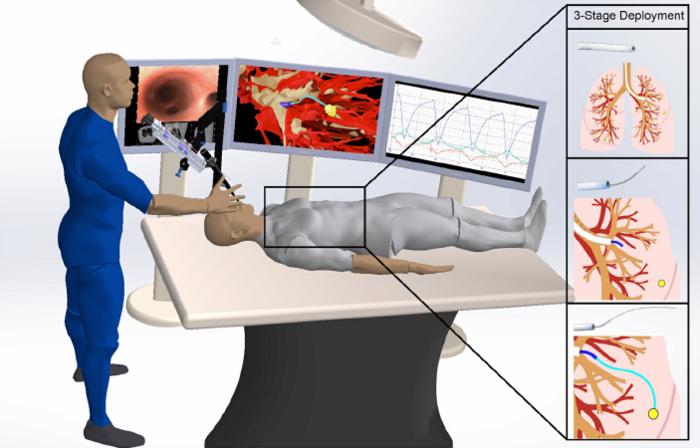
Dezvoltarea robotului cu ace dirijabile autonome a valorificat cultura de înaltă colaborare de la UNC prin îmbinarea expertizei în medicină, informatică şi inginerie. Prezentare generală a celor trei etape ale robotului medical semiautonom în plămâni. Credit Kuntz et al.
Robotul este alcătuit din mai multe componente separate. Un control mecanic asigură împingerea controlată a acului pentru ca acesta să iniţieze o cursă înainte şi înapoi.
Designul acului permite şi direcţionarea pe trasee curbe. Acul este fabricat dintr-un aliaj de nichel-titan şi a fost gravat cu laser pentru a-i creşte flexibilitatea, permiţându-i să se deplaseze fără efort prin ţesut.
Pe măsură ce se deplasează înainte, gravura de pe ac îi permite să ocolească cu uşurinţă obstacolele. Alte accesorii, cum ar fi cateterele, ar putea fi utilizate împreună cu acul pentru a efectua proceduri precum biopsiile pulmonare.
Pentru a trece prin ţesut, acul trebuie să ştie încotro se îndreaptă.
Echipa de cercetare a folosit tomografii computerizate ale cavităţii toracice a subiectului şi inteligenţa artificială (AI) pentru a crea modele tridimensionale ale plămânului, inclusiv căile respiratorii, vasele de sânge şi ţinta aleasă.
Folosind acest model tridimensional şi odată ce acul a fost poziţionat pentru lansare, software-ul lor bazat pe inteligenţă artificială îi dă instrucţiuni pentru a se deplasa automat din „punctul A" în „punctul B", evitând în acelaşi timp structurile importante.
„Vârful dirijabil autonom pe care l-am dezvoltat este foarte compact, dar sistemul este dotat cu o suită de tehnologii care permit acului să navigheze autonom în timp real", explică Ron Alterovitz, cercetător principal al proiectului şi autor principal al lucrării.
„Este asemănător cu o maşină care se conduce singură, dar care navighează prin ţesutul pulmonar, evitând obstacole precum vasele de sânge semnificative în timp ce se deplasează spre destinaţie", spune el.
Acul poate ţine cont şi de mişcarea respiratorie.
Spre deosebire de alte organe, plămânii se extind şi se contractă în mod constant în cavitatea toracică.
Acest lucru poate face ca ţintirea să fie deosebit de dificilă la un subiect viu, care respiră. Potrivit lui specialiştilor, este ca şi cum ai trage într-o ţintă în mişcare.
Cercetătorii şi-au testat robotul în timp ce modelul de laborator a efectuat o reţinere intermitentă a respiraţiei.
De fiecare dată când subiectul îşi ţine respiraţia, robotul este programat să se deplaseze înainte.
„Rămân unele nuanţe în ceea ce priveşte capacitatea robotului de a achiziţiona ţinte şi apoi de a ajunge efectiv la ele în mod eficient", spune dr. Akulian, care este, de asemenea, membru al Centrului de cancer UNC Lineberger, „şi, deşi mai sunt încă multe de făcut, sunt foarte entuziasmat de ideea de a continua să depăşim limitele a ceea ce putem face pentru pacienţi cu experţii de talie mondială care se află aici".
Potrivit medicului, echipa intenţionează să creeze noi roboţi medicali autonomi care să combine punctele forte ale roboticii şi ale inteligenţei artificiale pentru a îmbunătăţi rezultatele medicale pentru pacienţii care se confruntă cu o varietate de probleme de sănătate, oferind în acelaşi timp garanţii privind siguranţa pacienţilor.




