
Cercetătorii de la Universitatea din Leeds au dezvoltat un robot minuscul care poate pătrunde adânc în plămâni pentru a detecta şi trata primele semne de cancer.
Tentaculul ultra-moale, care măsoară doar 2 milimetri în diametru şi este controlat de magneţi, poate ajunge la unele dintre cele mai mici bronşiole şi ar putea transforma tratamentul cancerului pulmonar. (Foto articol: Prim-plan al unui robot cu tentacule magnetice lângă un model de bronşiolă Credit: STORM Lab, Universitatea din Leeds).
Noul dispozitiv deschide calea pentru o abordare mai precisă, personalizată şi mult mai puţin invazivă a tratamentului şi a fost dezvoltat de ingineri, oameni de ştiinţă şi clinicieni de la STORM Lab din Leeds.
Cercetătorii au testat robotul cu tentacule magnetice pe plămânii unui cadavru şi au constatat că acesta poate intra cu 37% mai adânc decât echipamentul standard şi duce la o deteriorare mai mică a ţesuturilor.
Rezultatele investigaţiilor lor, care au fost finanţate de Consiliul European de Cercetare, au fost publicate joi, în Nature Engineering Communications.
„Această nouă abordare are avantajul de a fi specifică anatomiei umane, este mai flexibilă decât aceasta şi complet controlabilă prin intermediul funcţiei magnetice. Aceste trei caracteristici principale au potenţialul de a revoluţiona navigaţia în interiorul corpului", a declarat profesorul Pietro Valdastri, director al STORM Lab şi supervizor al cercetării.
Cancerul pulmonar are cea mai mare rată de mortalitate prin cancer la nivel mondial.
În stadiul incipient al cancerului pulmonar fără celule mici, care reprezintă aproximativ 84% din cazuri, intervenţia chirurgicală este standardul de tratament.
Aceasta este, de obicei, foarte invazivă şi duce la îndepărtarea semnificativă de ţesut. Această abordare nu este potrivită pentru toţi pacienţii şi poate avea un impact asupra funcţiei pulmonare.
[ot-video][/ot-video]
Video: Demonstraţie cu un model de plămâni - navigare şi localizare folosind tentacule magnetice personalizate. Credit: STORM Lab, Universitatea din Leeds
Programele de depistare a cancerului pulmonar au dus la îmbunătăţirea ratelor de supravieţuire, dar au evidenţiat, de asemenea, nevoia urgentă de a găsi metode neinvazive de diagnosticare şi tratament precoce al pacienţilor.
Pe lângă îmbunătăţirea navigării în interiorul plămânilor în timpul biopsiilor, robotul cu tentacule magnetice ar putea deschide calea pentru un tratament mult mai puţin invaziv, permiţând medicilor să vizeze doar celulele rele, permiţând în acelaşi timp ca ţesutul şi organele sănătoase să continue să funcţioneze normal.
„Scopul nostru a fost şi este acela de a oferi un ajutor curativ cu durere minimă pentru pacient", a adăugat coautorul raportului, dr. Giovanni Pittiglio, care a efectuat cercetarea în timp ce îşi desfăşura doctoratul la facultatea de inginerie electronică şi electrică a universităţii din Leeds.
„Acţionarea magnetică de la distanţă ne-a permis să facem acest lucru folosind tentacule ultra-moi care pot ajunge mai adânc în ţesuturile din organism, modelându-se în acelaşi timp pe anatomia pacientului şi reducând traumatismele", a precizat el.
În continuare, echipa va colecta toate datele care le vor permite să înceapă testele pe oameni.
Cum pot lucra împreună roboţii cu tentacule magnetice
Cercetătorii de la STORM Lab au investigat, de asemenea, modalităţi de a controla doi roboţi magnetici independenţi, astfel încât aceştia să poată lucra împreună într-o zonă restrânsă a anatomiei umane, permiţându-i unuia dintre ei să deplaseze o cameră, iar celuilalt să controleze un laser pentru a îndepărta tumorile.
Dispozitivele sunt realizate din silicon pentru a minimiza deteriorarea ţesuturilor şi sunt dirijate de magneţi montaţi pe braţe robotice în afara corpului pacientului.
Folosind o replică a unui craniu, echipa a testat cu succes utilizarea a doi roboţi pentru a efectua operaţii endonazale pe creier, o tehnică care permite chirurgului să intre prin nas pentru a opera zonele din partea frontală a creierului şi din partea superioară a coloanei vertebrale.
Cercetătorii aveau nevoie ca roboţii magnetici să se mişte independent unul de celălalt, astfel încât unul să poată deplasa camera, în timp ce celălalt să poată direcţiona un laser asupra unei tumori.
În mod normal, doi magneţi plasaţi foarte aproape unul de celălalt s-ar atrage reciproc, ceea ce ar fi creat o provocare pentru cercetători.
Aceştia au depăşit însă acest obstacol prin proiectarea corpurilor tentaculelor astfel încât acestea să se poată îndoi doar în anumite direcţii şi prin relocarea polilor nord şi sud în fiecare tentacul al robotului magnetic.
Aceştia au reuşit apoi să simuleze îndepărtarea unei tumori benigne de pe glanda pituitară aflată la baza craniului, demonstrând pentru prima dată că este posibil să controleze doi roboţi într-o zonă limitată a corpului.
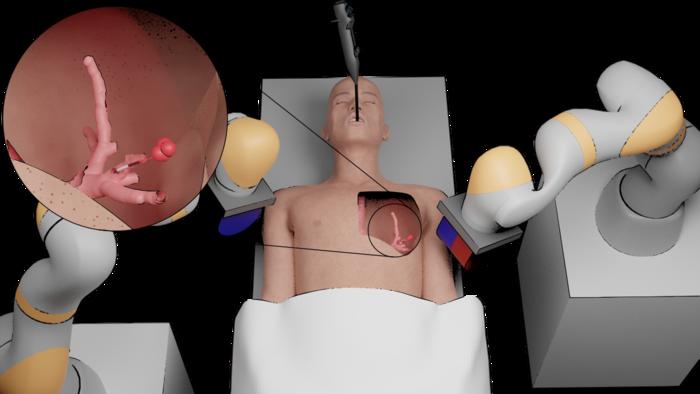
(Platformă robotică pentru intervenţia asupra tumorilor pulmonare periferice bazată pe tentacule magnetice. Credit: STORM Lab, Universitatea din Leeds).
Rezultatele cercetării lor, care a fost finanţată de Consiliul European de Cercetare şi de Consiliul de Cercetare în Ştiinţe Fizice, au fostpublicate tot joi, în Advanced Intelligent Systems.
"Este o contribuţie semnificativă la domeniul roboticii controlate magnetic.Rezultatele noastre arată că procedurile de diagnosticare cu o cameră, precum şi procedurile chirurgicale complete, pot fi efectuate în spaţii anatomice mici", a declarat la rândul său autorul principal al lucrării, Zaneta Koszowska, cercetător în cadrul facultăţii de inginerie electronică şi electrică de la Leeds.

Prima demonstraţie de roboţi moi magnetici bimanuali pentru chirurgia de la baza craniului. Credit: STORM Lab, Universitatea din Leeds).




